
3D传感技术根据工作原理一般分为红蓝(RGB)双目成像、飞行时间(Time Of Flight,TOF)法和结构光三种,由于红蓝(RGB)双目技术属于被动成像,对图像算法和光线要求较高,在背景光较暗或高曝光度的环境下成像效果较差,因此很少采用。目前主流的技术为TOF和结构光。
01 TOF技术
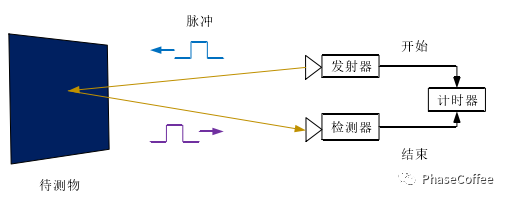
TOF是一种利用光飞行时间的光学测距方式,大量应用于激光雷达、深度摄像头等三维深度感知传感器上。TOF激光雷达主要由发射器、接收器、高精度计时器组成。激光发射器发射出已调制的激光光束,光束到达观测物表面并反射回接收器。TOF激光雷达虽然体积小、抗干扰性强,但是其测量分辨率受计时器计时精度限制,且功耗较大。
TOF 技术有两种不同发射光的调制形式,分别是直接飞行时间测量(Direct-TOF,即 dTOF)和间接飞行时间测量(Indirect-TOF,即 iTOF)。其中,直接飞行时间测量采用的是脉冲调制,而间接飞行时间测量则采用连续波调制。
1.1 DTOF(Direct-TOF)技术
脉冲调制法一般采用方波脉冲,通过计时器直接计算脉冲发射和接收的时间差,进而求得距离。这种测量方法简单,响应较快,但是对硬件的要求较高。
在脉冲调制方案中,一般采用方波调制光源,在数字电路中较容易实现。接收端的每个像素均由一个将入射光转换为电流感光单元组成,连接2个由解调模块控制的开关(图中的G1和G2),其开关和解调的频率有关,当光子(图中的黑色箭头)被感光元件接收时,且当G1闭合时,充好电的电容C1就会与感光元件释放出来的电子中和,此时电容C1放电,直到中和完毕,最后得到的电容C1中的电平就代表接受光子数量和时间的电平。开关G2闭合时,充好电的电容C2会与感光元件释放出来的电子中和,然后形成C2中的电平。由于单个脉冲持续时长非常短,这个过程会重复几千次,直到相机的曝光时间结束。
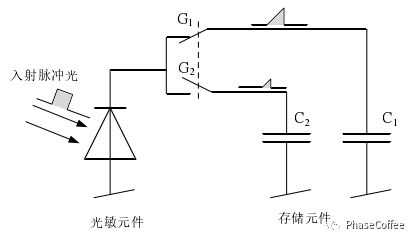
脉冲调制数字电路示意图
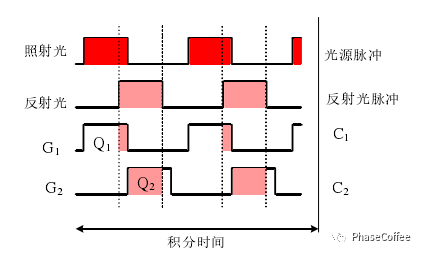
脉冲调制法积分时间示意图
假设光速为c,发射脉冲频率为f,光源照射时间为t。在两个窗口打开时,即电容高电平时,且此时存在物体反射回来的脉冲波,两个不同窗口会在各自的时间内收集电荷(图中粉色部分)。假设电容C1收集到的电荷量为Q1,C2收集到的电容量为Q2。Q1与Q2之和表示有反射脉冲时间内收集到的电荷量。则通过计算Q2在反射脉冲时间中的占比就可以计算光的飞行时间。

1.2 ITOF(Indirect-TOF)技术
连续波调制法一般采用连续正弦波调制,通过光源不断发射调制过的红外激光,光束经被测物体表面反射后,有一部分光线按原路径返回并被探测器接收,由于发射、接收信号之间存在相位差,因此可以通过相位差检测技术间接的计算光的飞行时间差,其测量原理如图所示。
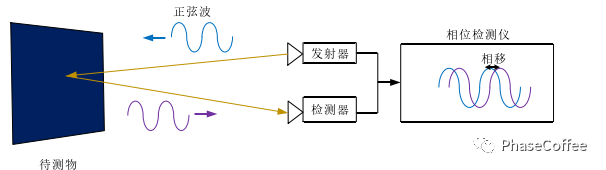
与脉冲调制波不同的是,连续调制波法每次测量获取多个样本,每个样本之间相位差为90°,共采4个样本,分别是C1-C4,即4相法。
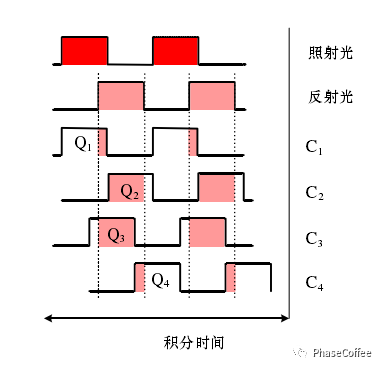
连续波调制法积分时间示意图
根据积分时间的示意图,可以得到相位偏移的计算公式:

再通过相位偏移计算深度

02 结构光测量技术
基于结构光法的三维重建主要利用光学三角测量原理来计算物体的深度信息。它主要通过扫描仪中的光源、光感应器和反射点构成的三角关系来计算目标物体的深度信息, 从而实现目标物体的三维重建。三角测量又可以分为: 单光点测量、单光条测量和多光条测量。
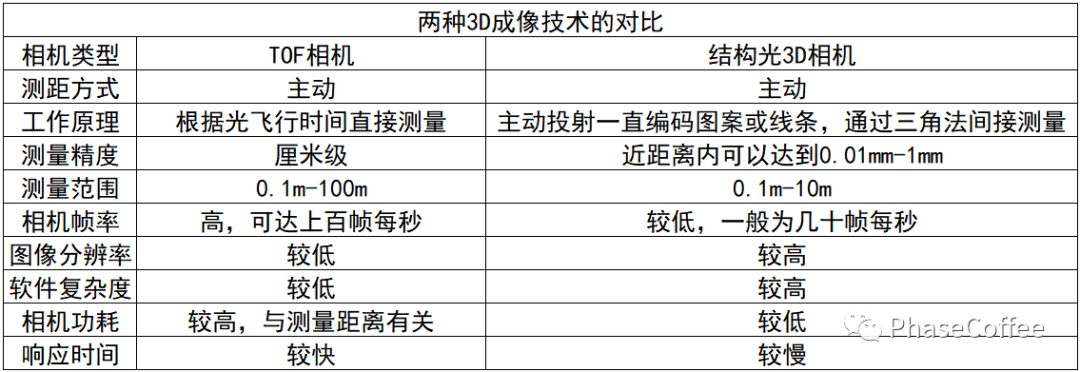
03 TOF技术与结构光三维成像技术的对比
3D结构光与TOF技术由于技术特点不同,都在不同领域有着自己的优势。
<1>TOF与结构光相比模组结构更简单,尺寸更小,在发射端,TOF基本不需要使用光学棱镜,而结构光由于需要形成特定的图案,需要添加衍射光栅和光学棱镜。
<2>结构光在近距离测量中精度更高。TOF技术的精度只能达到厘米量级,而结构光技术的精度可以达到毫米量级,因此在工业测量中被广泛使用。
<3>结构光技术只需要发射一次激光脉冲,就可以得到物体大量的深度信息,具有低功耗、高分辨率的特点。相反,TOF则需要多次发射激光脉冲,因此功耗较高、分辨率较低。
<4>TOF技术对算法要求更低,响应更快。结构光需要对编码的光信息进行深度处理,算法的复杂性较高。TOF技术复杂度较低,运算量小,处理时间短,因此可以达到更高的图像采集帧率。
综合来看,由于TOF技术测量范围较远,且采集图像速度和帧率更高,在汽车雷达和肢体动作识别领域应用更多;而结构光技术由于适用于近距离检测,且检测精度更高,因此在人脸识别、工业检测等领域应用更广。
参考文献:
[1] 3D传感技术分析及其应用市场和展望-中国集成电路
[2] 基于视觉的三维重建关键技术研究综述_郑太雄
[3] ToF与立体视觉技术相结合的三维重建方法研究_黄舒兰
UPOLabs
PhaseCoffee