
1.1激光雷达扫描系统原理
三维激光雷达是一种主要由扫描仪器、计算机和电源供应系统三部分构成的三维建模系统。三维激光扫描成像系统在工作中,需要对数据进行不断的采集和处理。它以扫描仪器为原点建立空间坐标系,空间坐标系里面的点云点来表达系统对目标物体表面的采样结果。
1.2立木材积测量原理
首先根据待扫描树木的位置、大小形态和需要获取的控制点设计各扫描站和控制标靶的位置。然后启动扫描仪、对目标立木进行扫描。最后利用软件进行点云数据处理建成立木的三维树干表面模型。在已知三维树干表面模型后,可以将树干模拟为若干个圆柱或者圆台构成。然后根据软件计算出立木材积。
1.3激光雷达测量扫描方式
三维激光扫描技术重构林地的三维数据模型,完成森林的资源调查,可以更容易实现对林地面积、木材蓄积量及森林覆盖率的资源调查,而且能够促进国内计算机视觉学科的发展与应用的推广。激光雷达对森林植被的测量方式有3种。
(1)机载激光雷达扫描
机载 LiDAR通过数据处理可以反演出树高,冠幅,胸径,森林边界等,可用于评价森林郁闭度,可以有效地对森林资源进行管理。但缺点是精度较差,点云较稀疏,不能很好地对单个树木进行建模,使得算法不能有效地对单棵树木细节特征进行分析和分类。
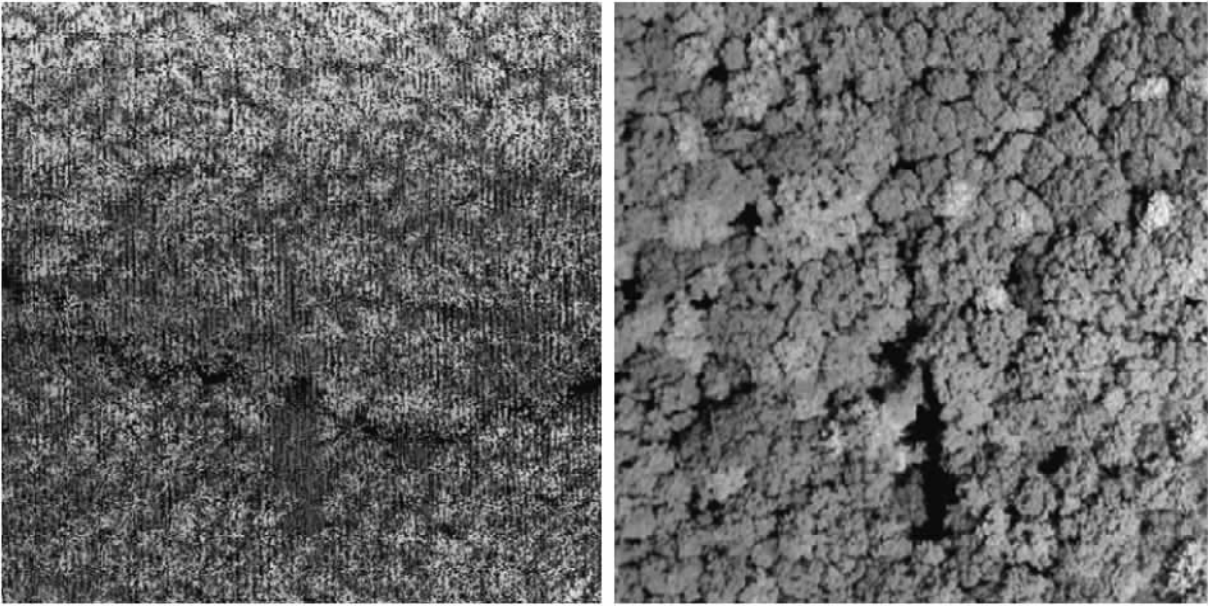
图 1(a)机载雷达数据 (b)对应区域的数字图像
图 1(a)为机载激光雷达对树林区域 100m×100m范围内进行扫描的图像,图 1(b)为对应区域的数字图像。
(2)地面静态激光雷达扫描
地面静态激光雷达可以通过对树干和枝条进行高密度采样覆盖来有效地解决了机载激光雷达不能够获取树木的三维模型细节的问题,可以精准地对单木三维形态进行细节上的建模。
其特点是精度高,对一、二类调查样地的单棵树木的细节保留完好,方便后期进行数据处理和树木分类。但缺点是需要人工进行静态扫描设备架设和地面标记,效率较为低下。在有大量树木遮挡或地面起伏较大的地带,需要对目标样地进行多站架设扫描,较为耗时。
(3)地面移动激光雷达扫描
地面移动激光雷达按扫描方式可分为手持式,车载式和背负式3种。
手持式激光雷达最为轻便,但是其测距范围小,应用局限性较大,通常用于小型静态物体的3D建模。
车载激光雷达测距范围最远,可以较快速地对大型建筑物和城市环境进行点云测量和建模,但是其体积太大,在森林资源调查中无法深入林地进行点云采集。
背负式激光雷达系统可以克服上述缺点,在获取较高精度点云数据的同时能灵活地在林地移动,但由于林地GPS信号较弱,传感器在林地的定位需要使用移动机器人的SLAM(同步定位于地图构建)技术来解决。由于定位精度将对点云模型的匹配与拼接产生巨大影响,所以SLAM问题也就成为了背负式激光雷达系统的核心问题。背负式移动测量由于其灵活,高精度的特性,将会逐渐成为未来室内或者林地移动测量的主要方式。
2 应用实例

表1为人工现场测量与三维激光扫描点云测量的实验数据对比。
从表中可以看出,在测量胸径方面,三维激光扫描仪获取测量值与人工测量值差异不大;
在测量材积方面两者测量结果存在一定误差,人工测量使用的二元材积表不能准确的反应特定立木材积,缺乏个体实用性更适用于林分,而三维激光扫描仪测量方法显得更为客观。
3 结论与讨论
1)高密度激光雷达(LiDAR)测量技术可以高效而准确快速地获取被测目标物的高密度三维点云信息,具有快速,准确,非接触式等显著优点,广泛地应用在森林资源调查中。案例结果表明基于静态激光扫描得到的点云数据具有较高的测量准确度。
2)三维激光扫描所得到的点云数据具有信息量大、采集相对简单、快捷以及可表现丰富细节等优点。因此,在大型复杂场景的点云数据中,针对扫描仪的作业方法、数据配准、精度控制、优化压缩、曲面重建等方面的研究都是近年来三维数据处理方面具有挑战性的研究课题。
3)三维激光扫描技术在森林资源的调查结果符合一般生长规律,且精度比较高。这表明三维激光扫描技术在森林资源调查中有很大的前景。
参考文献:
[1]吴春峰,陆怀民,郭秀荣,等.利用三维激光扫描系统测量立木材积的方法[J].森林工程,2009,25(3):71-72.
[2]熊妮娜,王佳,罗旭,等.一种基于三维激光扫描系统测量树冠体积方法的研究———以油松为例 [J].北京林业大学学报, 2007.29(S2):61-65.
[3]罗旭,冯仲科,邓向瑞,等.三维激光扫描成像系统在森林计测中的应用[J].北京林业大学学报,2007.29(S2):82-87.
[4]邓向瑞,冯仲科,马钦彦,等.三维激光扫描系统在立木材积测定中的应用[J].北京林业大学学报,2007,29(S2):74-77.
[5]BrandtbergT,WarnerTA,LandenbergerRE,etal.Detectionand analysisofindividualleafofftreecrownsinsmallfootprint,high samplingdensitylidardatafrom theeasterndeciduousforestin NorthAmerica[J].RemotesensingofEnvironment,2003,85(3):
290-303.
[6]庄永健,冯仲科,李亚藏,杨立岩,张力,孙梦营.激光雷达技术测树方法原理与应用[J]林业资源管理.2016年 12月 第 6期.
UPOLabs
PhaseCoffee